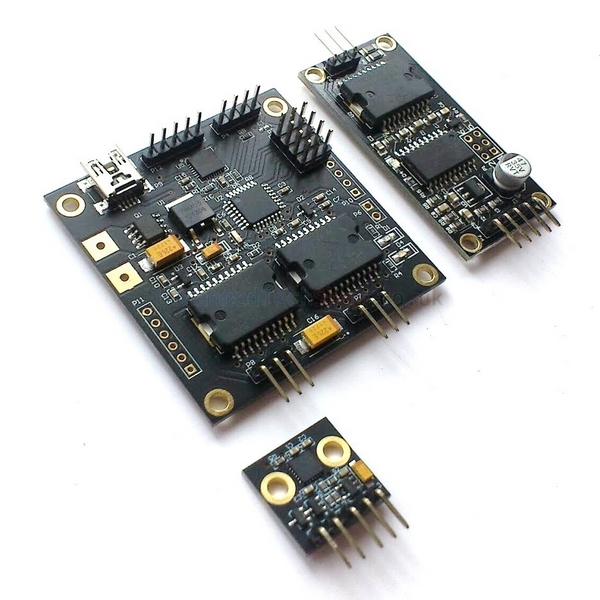
Carte Alexmos 3 axes sous licence officielle Alexmos/Basecam
Cette carte est utilisée pour contrôler les moteurs brushless montés en direct (BLDC) sur une nacelle brushless. Elle inclue une unité indépendante comprenant des capteurs (un accéléromètre et un gyroscope) qui sera directement montée sur la plateforme de la nacelle. Les données seront traitées par l'unité principale qui définira les angles d'inclinaison du plateau de la Nacelle pour obtenir une horizontalité parfaite.
Le PID (régulateur proportionnel embarqué sur l'unité principale) calcule donc le taux de compensation et envoie les ordres aux moteurs brushless qui réagiront immédiatement.
Caractérstiques :
Taille : 50*50mm
Connecteur USB
Driver moteurs brushless : L6234
Tension d'alimentation: 3S/4S lipo 16.4V max
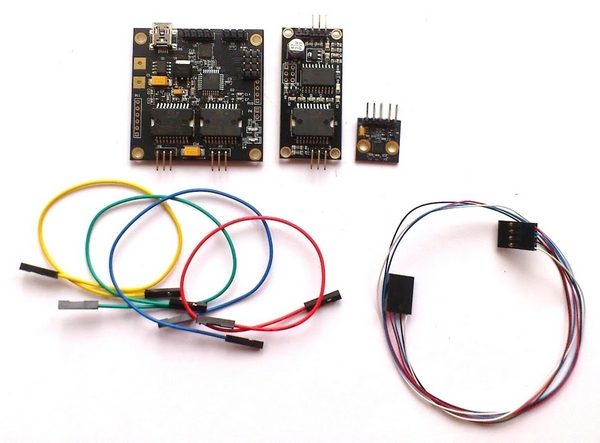
Inclus :
GBC V2.2B2 Universal Brushless Gimbal Controller main board